
An unmanned aerial vehicle (UAV) is an unpiloted aircraft. UAVs can be remote controlled or fly autonomously based on pre-programmed flight plans or more complex dynamic automation systems. They usually incorporate GPS and INS sensor for their own navigation.
There is a wide variety of UAV shapes, sizes, configurations, and characteristics. To distinguish UAVs from missiles, a UAV is defined as capable of controlled, sustained, level flight and powered by a jet or reciprocating engine. We focus here on unmanned aircraft used for remote sensing.

Fig. 1: helicopter UAV with digital camera loaded
Because of their moving skills, helicopter UAVs are most widely used. The UAV planes are selected for missions with high-speed, long-distance flyovers, while the Blimp type UAVS are recommended for long-duration observations, lasting several hours. They are sized specifically according to the payload required for the mission.

Fig. 2 : acquisition with a Blimp
Helicopter UAVs are motorized by gas or electric engines. Gas engine have more power and can last longer, while electric engines are quieter. The power of remote control aircrafts allow to take small payloads. Drones can carry various kinds of sensors: daylight, low-light, thermal camera, telemetry devices etc. For photography, drones manufacturers have developed platforms which can perform rotating movements of the camera, while compensating for the carrier’s inferred vibrations. Pictures controls are transmitted from the ground: optical axis direction and tilt, shutter release, focal length (zoom), etc.
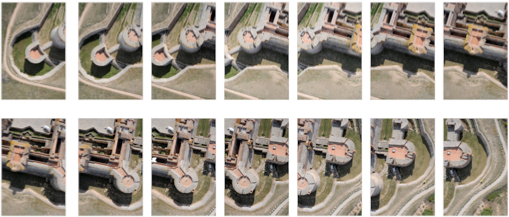
Fig. 3: example of data collected with a helicopter UAV flight.
Two kinds of data are collected from UAVs for architecture modeling: free viewing axis images to complete data collected from ground, and vertical viewing axis images (fig. 3), to compute Digital Elevation Models (fig. 4), by taking advantage of the stereoscopic photogrammetry configuration for quick data processing. A DEM is a digital representation of ground surface. A DEM can be represented as a raster image (such as a depth image), as a point cloud or as a triangular irregular network. It is a keyproduct for orthoimage computation (fig. 5), but it is also a way to complete data collected from ground.
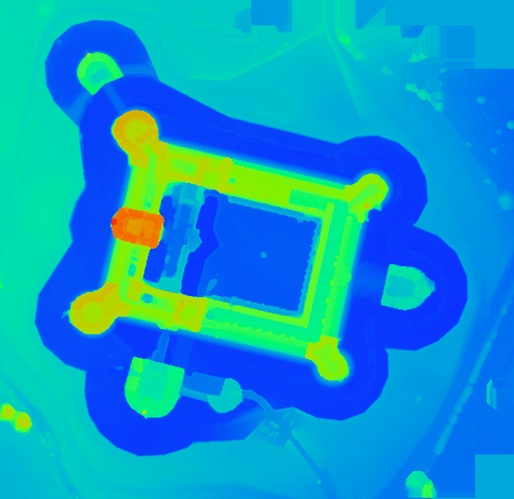

Fig. 4: Hypsometric and false-color shaded DEM computed from UAV data.
(thanks to M. Pierrot-Deseilligny, IGN).
The DEM computation process has two main stages: bundle adjustment, which estimates the whole acquisition geometric configuration, and surface reconstruction through digital image correlation, which computes ground points coordinates from dense image matching. Images collected for DEM need to overlap. This is necessary to form linking equations to compute bundle adjustment, which returns the camera poses. Of course, it is also required for correlation between images. Thanks to low altitude flights and high resolution camera, DEMs computed from UAV data can reach very high resolution. An orthoimage can be derived from the DEM. An orthoimage is a mosaic of rectified images, which have map properties. Images are corrected with regard to geometry (from perspective and depth) and radiometry (illumination variations).


Fig. 5: orthoimage computed from 126 images. (thanks to M. Pierrot-Deseilligny, IGN).
Building a uniform triangular mesh from the image topology is a basic process. A regular grid is built following the image grid structure. This is the simplest way of getting a surface representation out of a DEM map. However, mesh can be simplified or represented with TIN (Triangular Irregular Networks), which are lighter than regular grid meshes. Even though, these representations are not semantic representations, and mesh segmentation is to be done afterward.
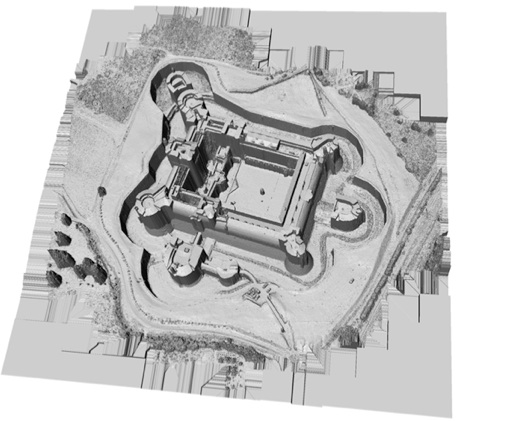
Fig. 6: 4 cm (1.6”) resolution DEM mesh.
As there is a simple orthogonal projection transformation between orthoimage and DEM, orthophotography can be projected onto the MNE mesh to produce a textured model. When dealing with buildings, this technique allows recovering most of the roofs surface and also the building’s surroundings. Although some information may be extracted on façades, geometric configuration and spatial resolution will not be suited to get sufficient information for 3D modeling. Complementary acquisition may be done from ground or from convergent views from UAVs. Also because of acquisition configuration, spatial resolution on vertical façades may be low, and this will lead to build a DEM mesh with high extension faces. When projecting orthoimage on these faces, they will get very few pixels (especially if DEM and orthoimage resolutions are the same). This will lead to a blur effect. Then it may be better not to texture vertical faces with zenithal axis images. A simple filter on faces length or normal direction enables to choose which face should be textured.

Fig. 7: Orthoimage mapping on the DEM mesh, perspective view.
Matthieu Deveau - May 2009 - Portal of Architectural Image-Based Modeling
Image recording from aerial vectors
Complementing terrestrial data recordings
Matthieu Deveau, UMR CNRS/MCC 694 MAP-Gamsau
matthieu.deveau@gamsau.archi.fr

Drones are devices which are able to fly without any human aboard. They are remotely controlled. There are many kinds of drone aircrafts: fixed or rotating wings, airship balloons. Their size, power, performance and use vary. Drones have been chosen for small field works because they can take pictures from low height, near objects to be sized, and above areas with hard access or with aeronautical restrictions or dangerous.
