
Chargement des images et configuration des cameras devices
Cliquez sur Add images pour charger les photographies et chargez le premier bloc d’images (de A1 à A5); sélectionnez New Camera et nommez la camera 18mm H pour indiquer que la camera utilisait un grand angle en position horizontale.

Une fois chargé le premier bloc d’images, répondez Oui à la question présente dans la boite de dialogue qui apparaît « Do you want to load other images ? » et ajouter les images des blocs B (de B1à B3), C (de C1 à C3), D (de D1 à D3). En cochant sur New camera, nommez la camera device 18mm-V pour indiquer que toutes les images ajoutées au projet ont été prises avec un grand angle en position portrait.

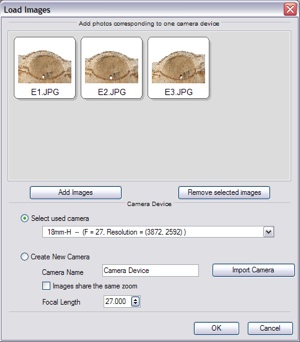
Une fois les images chargées, répondez à nouveau Oui pour charger les images du bloc E (de E1 à E3). Cette fois-ci sélectionnez l’option « Select used camera » en associant aux images du bloc la camera device 18mm-H précédemment créée pour indiquer que ces photographies ont été prises avec les mêmes parametres du bloc A. Cliquez Ok pour charger les images.
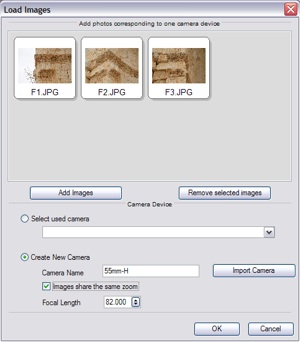
Une fois les images chargées, cliquez une dernière fois sur Oui pour ajouter les images du bloc F (de F1 à F3). Dans ce cas, les photographies ont été prises avec un téléobjectif en position paysage. Créez alors une nouvelle camera device en la nommant «55mm-H », et cliquez ok pour charger les images.
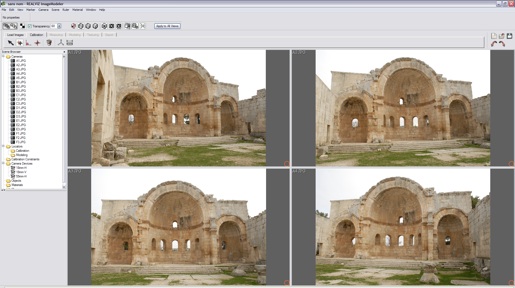
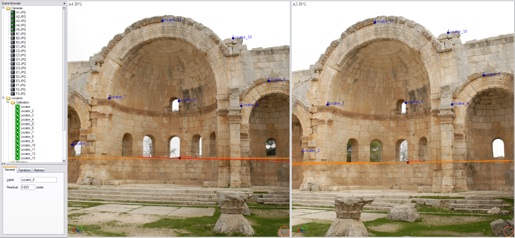
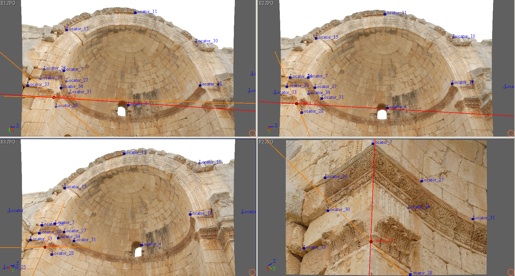
Une fois toutes les images chargées votre projet contiendra 20 photographies et trois camera devices comme montré dans le Scene Browser sur la gauche.
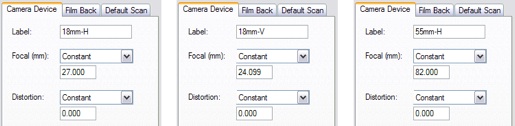
Sélectionnez les trois camera devices et dans la fenêtre de paramètres en bas à gauche de l’écran, associer à la focale et à la distorsion le mode « Constant » comme illustré dans l’image.
Calibration et orientation du bloc A
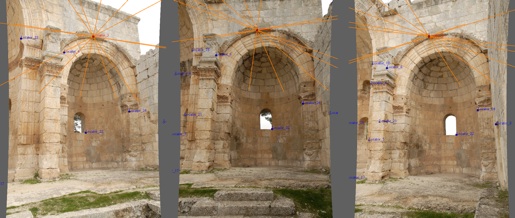
Pour calibrer les premiers bloc d’images divisez l’écran en deux parties sur l’horizontale et conduisez une calibration progressive par couples d’images. Commencez par les deux premières A1 et A2 avec 8 locators, calibrez manuellement et ensuite orientez les autres images (A3, A4, A5) sur 4 ou 5 locators extraits à partir des deux premières images. Une fois toutes les images du bloc calibrées, ajoutez des points pour affiner le calcul jusqu’à ce que les droites épipolaires se projettent correctement sur toutes les zones des images.
Calibration et orientation des blocs B, C et D
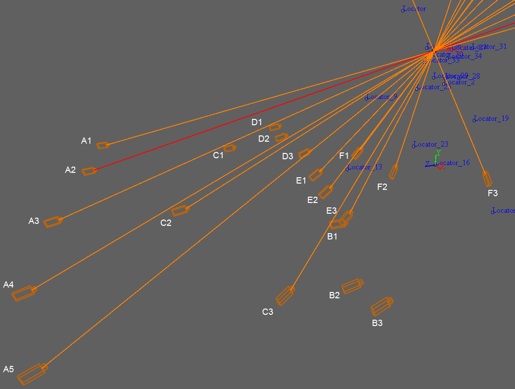
Pour calibrer les blocs B,C et D, commencez par diviser l’espace de travail en quatre partie (Window/layout/FourViews) et glissez l’icône de l’image C2 du browser à la fenêtre en bas à droite comme illustré dans la figure. Dans les autres fenêtres, affichez les images A1, A5, A3 (les deux plus latérales et la centrale).
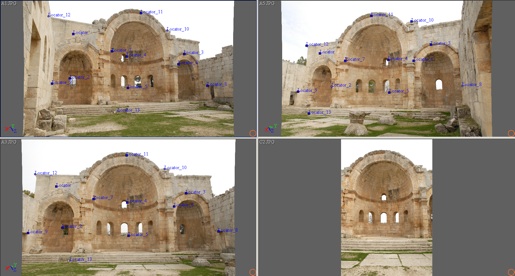
Sur les trois premières images, ajoutez des locators dans la partie centrale de façon à ce que l’on puisse ensuite indiquer dans la photo C2 au moins 8 points communs. Ajoutez les points et cliquez sur le bouton calibration pour recalculer les paramètres des cameras du bloc A.

Maintenant vous pouvez sélectionner les 8 locators de la partie centrale de l’édifice et en indiquer les points homologues dans l’image C2. Pour améliorer la visibilité des points divisez l’écran en 2 parties en assignant l’image A3 et C2 (les plus proches comme point de vue). Une fois tous les points transférés, appuyez sur le bouton Calibration pour orienter l’image. Si un message vous indique que les cameras ne sont pas bien installées, revenez en arrière avec la commande Edit/Undo pour vérifier si vous avez fait des erreurs.
Une fois la première image du bloc C calibrée, vous pouvez orienter toutes les autres images du même bloc (C1, et C3) ainsi que les images des blocs B et C avec seulement quatre (et pas 8) points communs, car les blocs B, C et D partagent les mêmes paramètres internes (camera device). Commencez par les images du bloc C : pour orienter chaque image, il faut que ces quatre locators soient déjà présents sur les autres images et qu’il soient bien distribués sur l’extension complète de l’image. Une fois toutes les images d’un bloc orientées, ajoutez des locators pour affiner le calcul d’orientation relative.
Faites la même chose pour les blocs B et D.

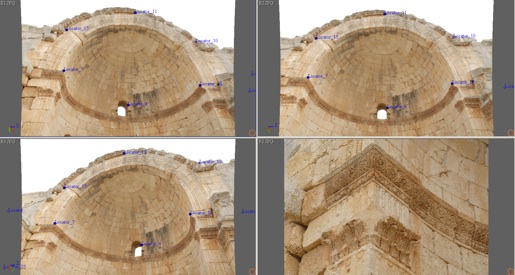
Orientation du bloc d’images E
En ce qui concerne les images du bloc E, il ne sera pas nécessaire de calculer une calibration (parametres internes) car les images de ce bloc partagent les mêmes paramètres (camera device) du bloc A. Il sera donc suffisant d’indiquer seulement 4 correspondances à choisir parmi les locators déjà extraits à partir des images des blocs déjà orientés.
Une fois orientée la première image du bloc E, vous pouvez effectuer la même opération sur les deux autres.

Calibration et orientation du bloc F
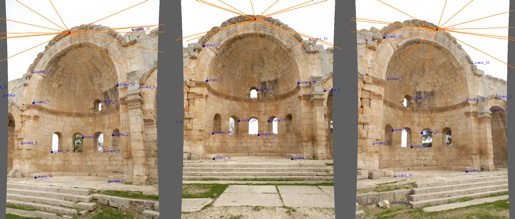
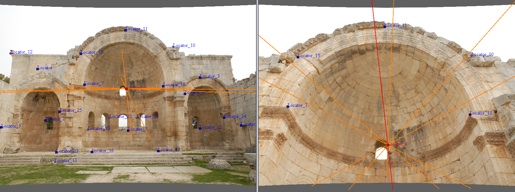
Pour calibrer et orienter les images du bloc F, il sera nécessaire d’indiquer au moins 8 locators communs entres les images déjà orientées et une des trois images du dernier bloc. Configurer l’espace de travail en quatre zones afin d’afficher les trois images du bloc E (les plus indiquées pour chercher des correspondances plus une du bloc F - F2 par exemple).
Ensuite créez 8 locators (visibles aussi dans l’image F2) en saisissant des correspondances entre deux ou trois images du bloc E et appuyez sur le bouton Calibration.
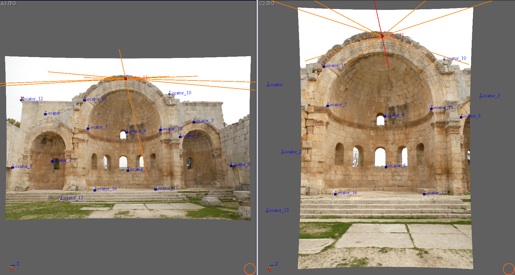
Maintenant vous pouvez transférer les 8/9 locators sur l’image F2 et appuyer sur le bouton Calibration afin de calibrer et orienter l’image. Une fois la calibration effectuée vous pouvez remarquer que l’image a subi une déformation inverse par rapport aux images des autres blocs, cela dépend du fait que les images des blocs A, B, C, D, E ont été prises avec un objectif grand angle, tandis que celles de ce dernier bloc ont été prises avec un téléobjectif.
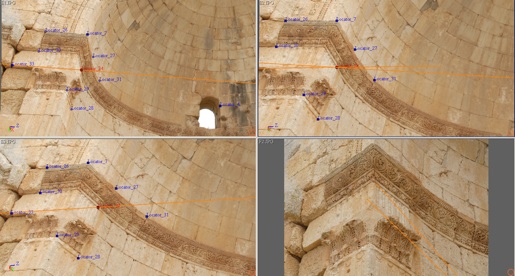
Une fois la première image du bloc calibrée, maintenant il vous suffira d’indiquer seulement quatre correspondances sur les deux autres images du bloc (F1 et F3) pour les orienter. Une fois la première mise en place effectuée, ajoutez des points communs aux trois images de ce dernier bloc pour affiner leur orientation relative.

De la même façon, maintenant que vous avez orientées toutes les images de l’exercice, il est important d’affiner le calcul global en ajoutant des nouveaux locators, en ajoutant des correspondances aux locators déjà existants et en vérifiant la correcte projection des droites épipolaires sur les images des différents blocs.
Livio De Luca - April 2009 - Portal of Architectural Image-Based Modeling
Calibration et orientation par emboîtement d'échelles
Site de Saint Siméon, Syrie
Livio De Luca, UMR CNRS/MCC 694 MAP-Gamsau
livio.deluca@gamsau.archi.fr

Ce tutoriel vous permettra d’appliquer la démarche de calibration par emboîtement d’échelles. Pour cet exercice six blocs d’images seront utilisés pour mettre en place 20 photographies au total. Les blocs d’images partagent trois différentes camera devices. Cet exercice démarre de la phase de configuration des camera devices, s’intéresse à la calibration du premier bloc sur lequel les autres blocs seront ensuite mis en place.
Logiciels
Autodesk Imagemodeler
Fichiers à télécharger
20 photos
1 fichier ZIP - Taille 108 Mb


